Micromouse
Autonomous maze-solving robots competing in the Micromouse competition
Current Prototyping Goal
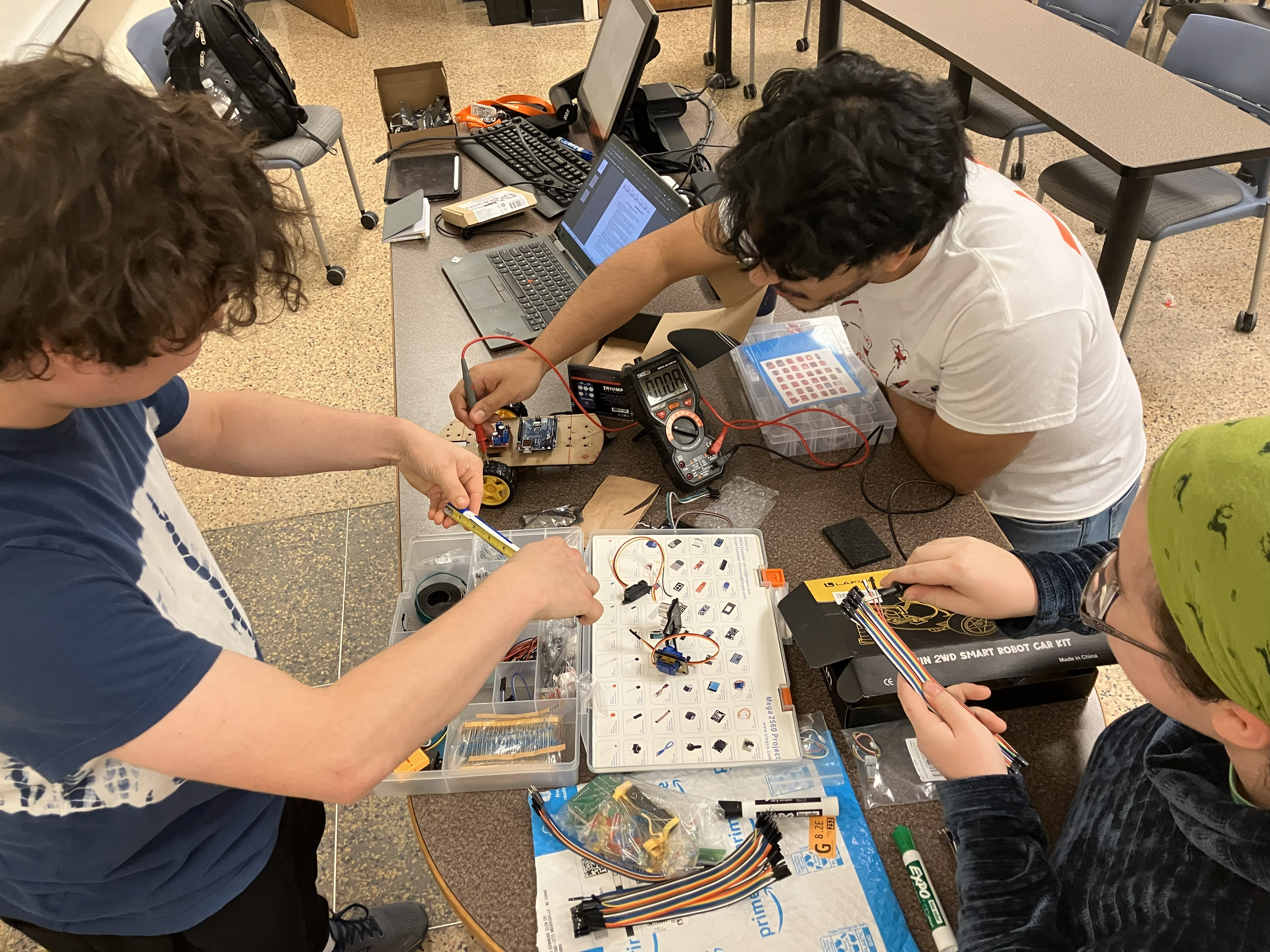
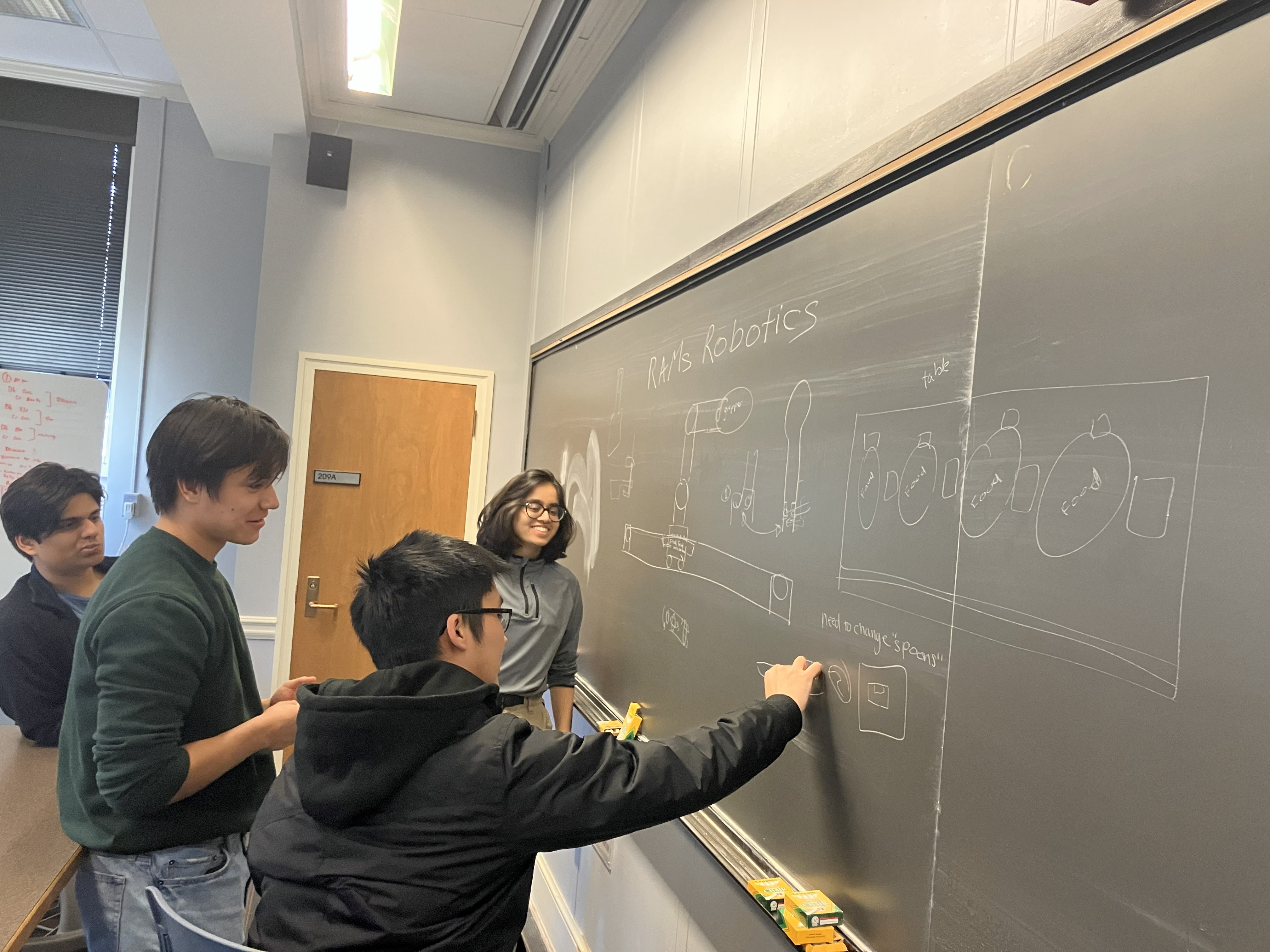
After our first Lidar sensor prototype last year, we are working on refining our Micromouse robot to improve its maze-solving speed and efficiency for upcoming competitions.
Team Members



Project Gallery